Generate edge and texture images using shapes resulting from light shading. Photometric stereo allows the user to separate the shape of an object from its 2D texture. It works by sequentially firing segmented light arrays from multiple angles and processing the resulting shadows utilizing “shape from shading.”
This can make visually noisy or highly reflective surfaces easier to inspect by removing these artifacts from the computed image. Numerous machine vision companies are now offering photometric stereo tools that control sequential image acquisition and image processing within their vision software and smart cameras.
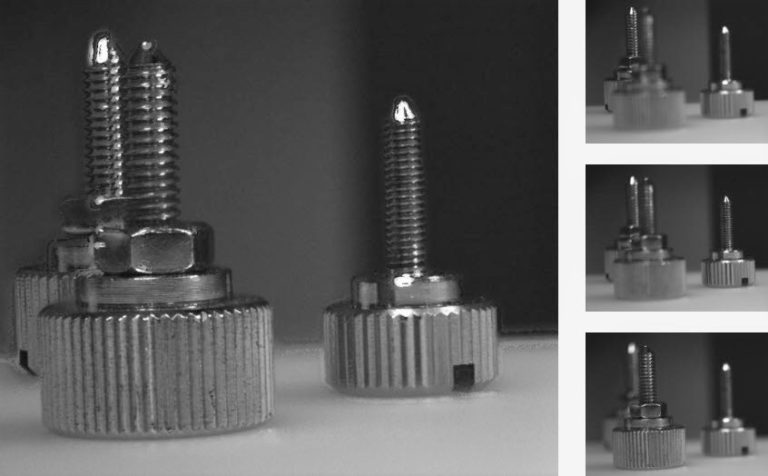
As an example, a basic PMS system may utilize a ring light with four individually controllable 90-degree quadrants to cast a directional shadow around the raised features on an object. The ring light quadrants were fired in sequence to create directional images shown below: